Magnetic Levitation System – 33-026 – Labview

Opis
33-026 – Labview
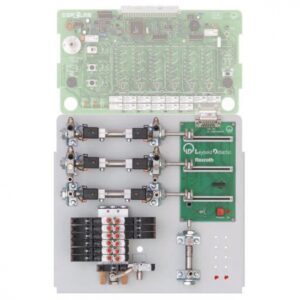
This classic magnetic levitation control problem is now presented in a new and innovative form. A 25mm diameter, hollow steel sphere is suspended in space with visually appealing results and convenient time constants. Both analogue & digital control solutions are implemented.
Convenient sockets on the enclosure panel allow for quick changes of analogue controller gain and compensation components. The equipment is self-contained in analogue mode, with built-in power supply. In the digital mode the system operates within a LabVIEW™ environment which allows the system parameters to be determined and the system to be modelled.
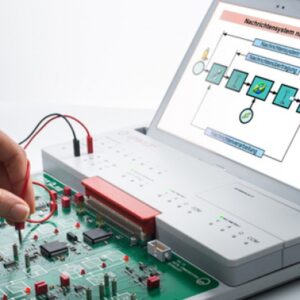
Once the digital controller parameters have been determined, the controller can be used to run the hardware and the actual control performance can be seen and analysed. Using LabVIEW™ together with the detailed training manuals supplied by Feedback and an Advantech PCI card [which creates an impressive digital control system development environment] the user is guided through the design process using Phenomenological process models, Dynamics analysis, Discrete models identification, Controller design, Controller tests on the model, Controller implementation in real-time applications, Implementation of various control strategies, Data visualisation,
The Phenomenological process models are designed in SIMULINK™ to provide initial models for the user to test. Model linearization is then discussed and the use of simple dynamics analysis – like bode diagrams poles and zeros maps are introduced.
To obtain accurate models Identification procedures incorporating LabVIEW™ functions are described. The user has a chance to go step-by-step through the discrete models identification. One of the ’obtained models’ is used for the Controllers design and PID control is explained.
A guide is given for PID controller design, testing, tuning and implementation on the model. Root locus technique is used to illustrate the changes that PID controller tuning inflicts on the control system performance. The designed controllers are prepared in SIMULINK™.
Marka
Feedback